Робот-гуманоид Kengoro
Точно по такому принципу происходит охлаждение механических систем в новом гуманоидном роботе Kengoro, который разработали в лаборатории робототехники JSK Токийского университета.
Как известно, в процессе фазового перехода вещества из жидкого состояния в газообразное некоторые молекулы жидкости отрываются от соседних молекул и улетают. Улетевшие молекулы обладают более высокой кинетической энергией, а средняя энергия оставшихся молекул становится меньше. Другими словами, жидкость на поверхности остывает — и тем самым охлаждает поверхность.
У робота выделение охлаждающий жидкости происходит проще, чем у человека. У млекопитающих этим занимается сложная система кожных желез.
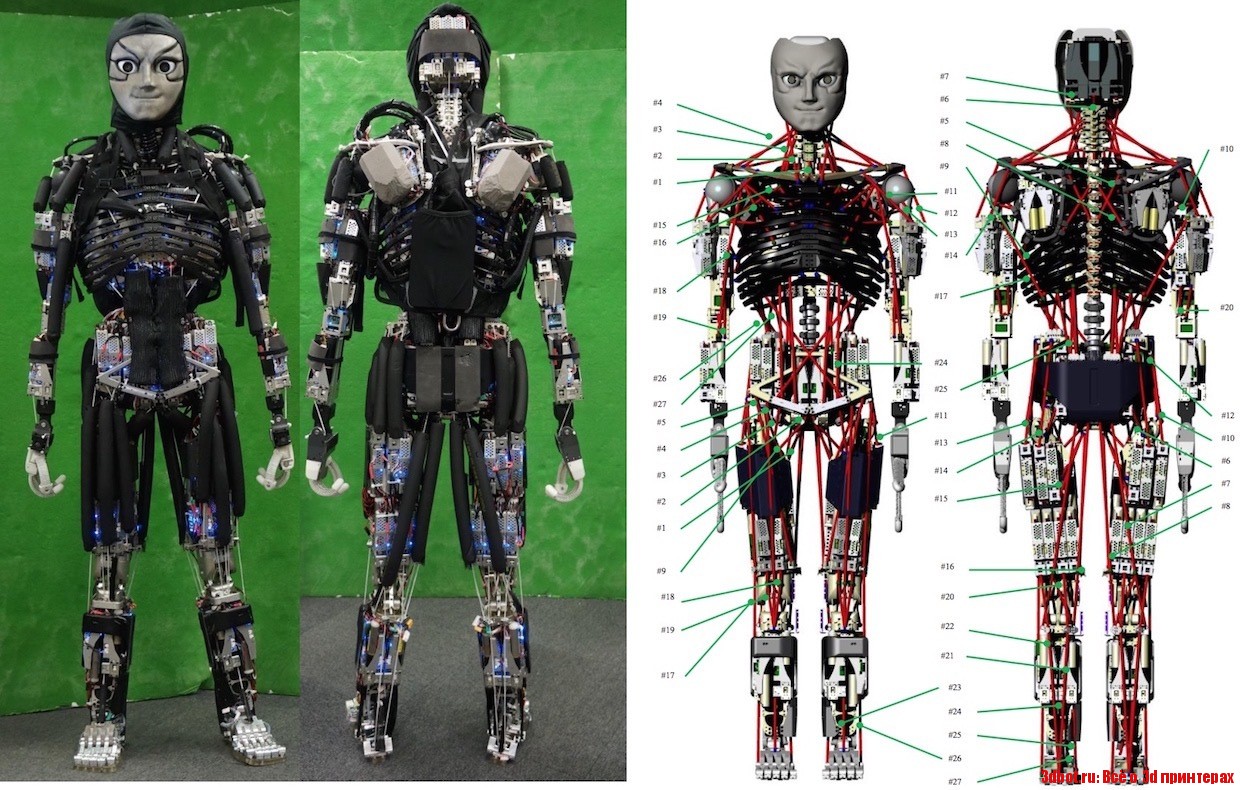
А у робота Kengoro — механические устройства, расположенные на раме рядом с электромоторами (на фотографии двигатель с подключенными проводами располагается в нижней части конструкции). Механические железы робота выделяют жидкость через раму на поверхность, охлаждая металл непосредственно рядом с двигателем.
Двухслойная пористая рама пропускает жидкость на поверхность. Она изготовлена из алюминия по технологии лазерного спекания. Вероятно, применяется технология прямого лазерного спекания (DMLS), а не выборочного. В процессе используются оптоволоконные лазеры мощностью около 200 Вт или больше. Порошковый материал подаётся в рабочую камеру в количестве, необходимом для нанесения одного слоя. Специальный валик выравнивает поданный материал в ровный слой и удаляет излишний материал, после чего лазерная головка спекает частицы свежего порошка между собой и с предыдущим слоем согласно контурам, определённым цифровой моделью в формате STL. Разрешение печати составляет около 20 микрон. После первого слоя начинается спекание следующего и так далее.
В докладе на научной конференции авторы описали процесс производства деталей из алюминия и пористой структуры, которая не допускает утечки жидкости, а также привели результаты испытаний материала на прочность и эффективности системы охлаждения (к сожалению, доклад пока не опубликован в открытом доступе).
Японские инженеры посчитали такой метод терморегуляции вполне приемлемым. Тесты показали, что он в три раза эффективнее, чем обычное воздушное охлаждение, и значительно лучше, чем водяное охлаждение, в которой вода циркулирует по замкнутому контуру. Правда, «потовыделение» всё-таки уступает по эффективности традиционным радиаторам с активным охлаждением.
Специальная система охлаждения может значительно повысить работоспособность роботов в некоторых условиях. Например, при интенсивной работе на жаре. Можно вспомнить, как хорошо проявил себя SCHAFT с водяным охлаждением на конкурсе роботов DARPA Robotics Challenge Trials в условиях жаркой пустыни, когда некоторые другие роботы страдали от глюков в и падений.
Благодаря охлаждению моторов робот Kengoro способен к энергичным движениям в конфигурации с низким передаточным отношением редуктора привода. Например, он может отжиматься от пола 11 минут подряд без отказа моторов из-за перегрева.
Робот Kengoro ростом 1,7 метра и весом 56 кг сконструирован на основе опорно-двигательного аппарата, тоже мимикрирующего строение человеческого тела. Для этого в конструкцию машины пришлось включить аж 108 моторов. Плюс многочисленные шестерёнки и печатные платы с электроникой. Без охлаждения здесь никак не обойтись.
Презентация Kengoro состоялась на роботехнической конференции IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), которая проходит 9-14 октября в Южной Корее.
Изобретённую систему охлаждения, мимикрирующую под человеческое тело, авторы описали в нескольких научных статьях и докладах на конференциях. Например, “Human Mimetic Musculoskeletal Humanoid Kengoro for Real World Physically Interactive Actions” (2016 JSME Conference on Robotics and Mechatronics, 2A1-13a2, 2016), “Skeletal Structure with Artificial Perspiration for Cooling by Latent Heat for Musculoskeletal Humanoid Kengoro” (2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, paper WeH2.5).
Kengoro — первый в мире робот, рама которого используется не только как несущий каркас для жёсткости, но и для вспомогательных задач: транспортировки жидкости и терморегуляции. При этом она хорошо выполняет и свою основную функцию.
На сайте JSK можно найти информацию ещё о нескольких интересных гуманоидных роботах, спроектированных в лаборатории. Например, роботе Keshiro с ещё более продвинутым опорно-двигательным аппаратом, чем у Kengoro.
>>>БАЗЫ ДАННЫХ(EMAIL, ТЕЛЕФОНЫ). БЕСПЛАТНО.<<<





Добавить комментарий